Timeline
09.21 – FA18 first meeting
We thought about what on campus we wanted to change, and how we could change it via robotics.
We defined several criteria before getting to work:
1. Creativity
2. Feasability
3. Implementability
We wanted to create a robot that would add value to our surroundings - instead of participating in a robot v robot competition, we decided to work on human & robot interaction.
Additionally, we wanted to make our initiative accessible to the entire community. We therefore started with the very basics of getting an LED to blink.
Engineers attempting non-engineer stuff: syntax error
10.17 – Budget Approved
After several rounds of pitching our idea to the student body, we secured our budget and were able to start prototyping.
Our new members got straight to work, getting familiar with the equipment and getting their hands dirty!

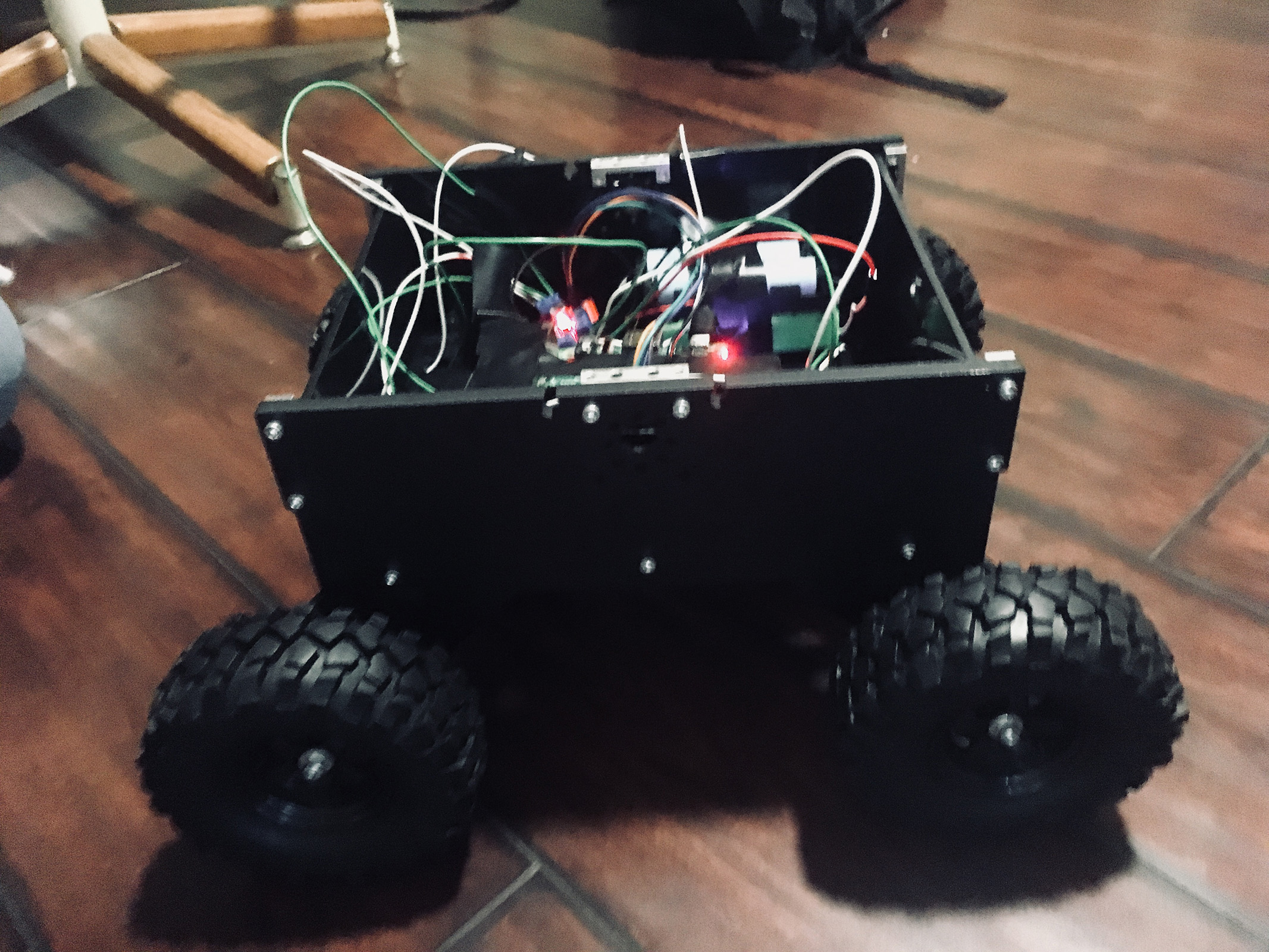
11.22 Lucy, our prototype is born
We concluded our two-month long "initiation to robotics" on a high note!
We conceived a working prototype for our future model: We went with a rudimentary four-wheeled design as a base, implementing bluetooth connectivity and GPS positioning for control.
Coincidentally, our Drivetrain team is working on a self-balancing two-wheeled version for Lucy 2.0. Our Navigation team is implementing SLAM for positioning and autonomous navigation. Our Interactive systems team is designing a new vocal user interface using NLP.